机器人的眼睛,Swift飞拍视觉系统
李群自动化(QKM)自主研发的Swift飞拍视觉系统已经运用到好几个解决方案里了,但还没有好好介绍过它,今天李先生充当一回讲师,给大家详细讲讲这款飞拍视觉系统。
在机器人拾取放置工件的过程中,常常会因为以下两种原因导致放置位置达不到精度要求。
1、第一次视觉/机械定位精度不够;
2、由于夹具拾取方式的限制导致在拾取的瞬间工件的位置发生偏移。
针对这样的情况,QKM研发了Swift飞拍视觉系统——Vision on the Fly(VotF),对工件进行拍照纠偏。
技术突破
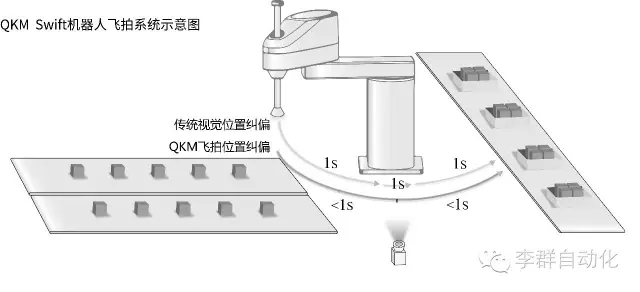
传统的工业机器人行业内都有对工件进行位置纠正的视觉解决方案。通常的做法是使用倒装的相机,工件按照既定的轨迹运动,当经过相机上方时,停下来拍照,纠偏,继续完成轨迹及工件的放置。
而QKM的Swift飞拍视觉系统,在工件经过相机上方的时候,却不需要停顿,直接动态拍照和纠偏。同时不会影响到机器的精度和速度,大大的提高了生产效率。
我们将两种视觉系统进行了对比,可以看出明显的差别。
QKM的Swift飞拍视觉系统,究竟拥有哪些技术特点和应用案例呢,下面就给大家作一个全面的介绍吧。
速度快 精度高
Swift飞拍视觉系统通过机器人内部芯片实时联动相机拍照和机器人的运动,直接实现在运动过程中对工件进行位置纠偏,不需要停顿,不需要降速,重复定位精度高达0.03mm*。
*重复定位精度测试条件:机器人70%速度,130万像素相机,500次测试数据的3∑结果(包含QKM AH机器人重复定位误差0.02mm,只去掉视觉引入的误差)。
单视觉 多目标
Swift飞拍视觉系统仅用一个相机便可以对视场范围内的多个物件进行检测*,然后配合机器人运动进行位置纠偏。
*只要是视场内的物件,都可以实现纠偏,通常的应用实例为1-4个物件。
低成本 易维护
Swift飞拍视觉系统使用的是机器人内部的程序模拟I/O触发相机进行拍照和图像识别,无需额外购买传感器,既降低了成本,同时简化了调试,方便维护。
工件检测支持各种视觉功能
Swift飞拍视觉系统除了能对工件进行位置纠偏,同时可以直接对工件的尺寸、颜色等特征信息做检测,为机器人的下一步动作做出预判断。
空说无用,实际的应用案例才可以体现出Swift飞拍系统的与众不同。
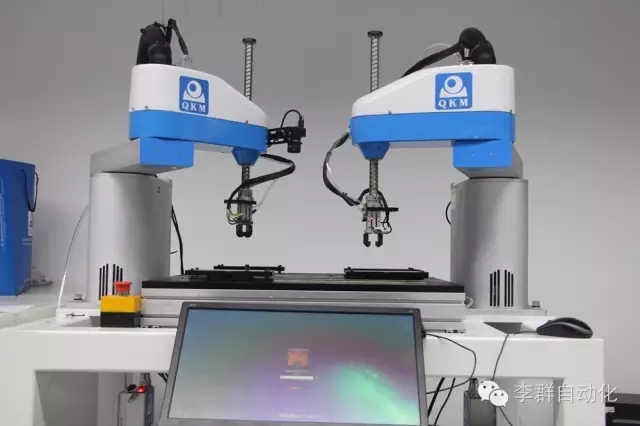
应用案例
QKM 的Swift飞拍视觉系统已经在多个不同的生产场景中进行应用,功能效果获得了业界的认可,下面就一起看看Swift飞拍视觉系统怎么运用到解决方案中。
玻璃屏幕上下料
玻璃屏幕在完成印刷的时候一般油墨未干,此时放置到料盘的精度不够,会导致屏幕上的油墨被刮花,造成材料的损耗。在这种场景下,应用QKM的飞拍系统,在不降低速度的同时,对夹具上的玻璃屏幕进行位置纠偏,提高精度,满足放置要求,大大降低了材料的损耗。


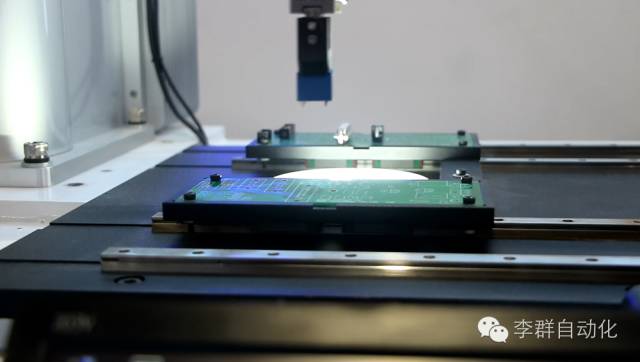
PCB板元件安装
PCB板上的针孔尺寸通常较小,普通的视觉+机器人很难完全满足精度要求,放置安装时很容易造成电子元件的损耗,同时也会给生产线带来其他方面的风险。而现在只需要在原来的基础上加上QKM的Swift飞拍视觉系统,便能解决安装精度和生产效率的问题。
看完详细的报告,你一定对这款Swift飞拍视觉系统有了很大的兴趣,我们也希望这款飞拍系统未来能够应用到更多的行业中去,解决更多的实际生产问题。


